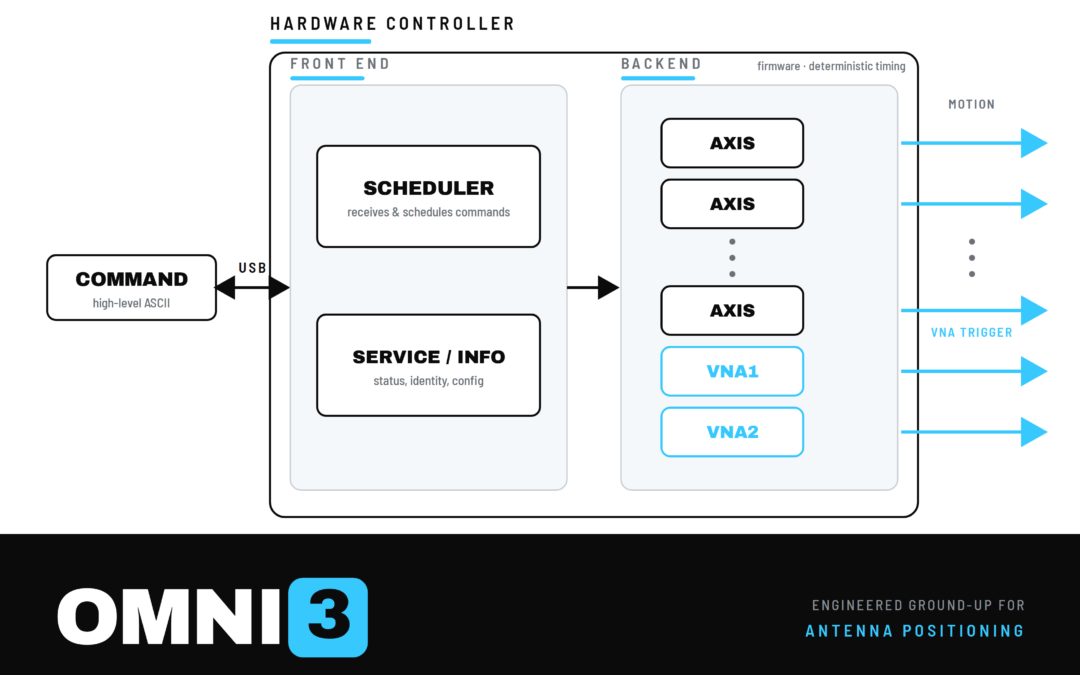
We are pleased to introduce the OMNI3, a high-level motion engine and command interpreter engineered from the ground up for antenna positioning.
As an evolution of the current controller, the OMNI3 adds significant functionality while keeping automation programming straightforward. There is no SDK, API, or PC-OS-Python latency involved — just high-level ASCII commands over Serial-over-USB, compatible with Python, LabVIEW, C#, MATLAB, or a plain terminal.
The non-blocking architecture runs asynchronous, synchronous, and continuous motion together. Axes can run alone, together, or coordinated to start and land in sync, while the controller deterministically handles all timing for measurement accuracy.
Hardware-based VNA triggering
The dual-channel VNA trigger operates entirely in hardware, so latency from the PC, operating system, or USB connection never affects the measurement. A single command arms the trigger with full control over trigger conditions. With two independent channels, the OMNI3 supports advanced acquisition schemes including spiral patterns and combined azimuth and roll. Both channels are direction-aware and support pre-trigger offsets to center the measurement window precisely.
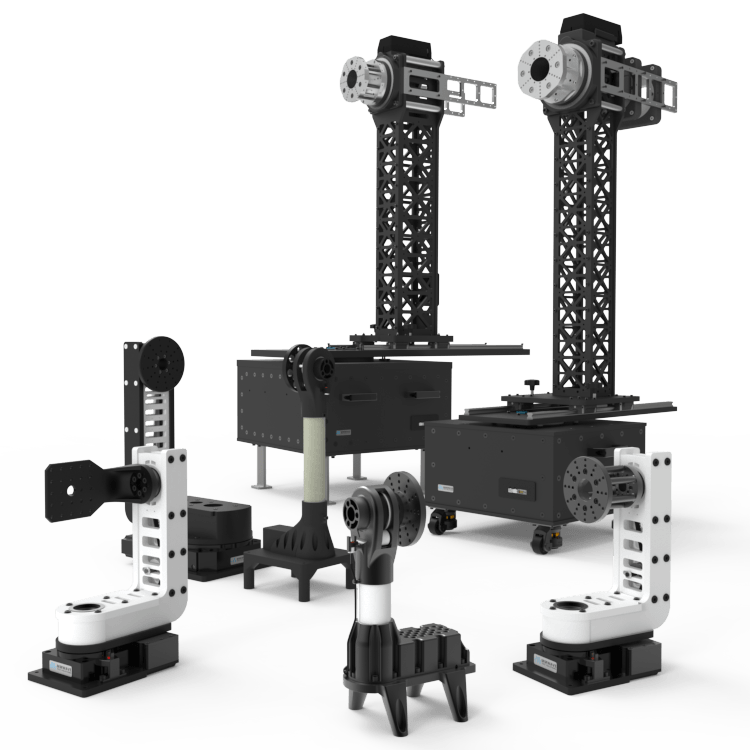
Our UNO and DUO positioners will have all functionality included.

UNO Positioners
Single-arm and spherical positioners

DUO Positioners
Two-armed positioners